
Information Security
CAN 통신 -1 본문

제어기 1, 2, 3, 4 와 버스가 연결되어 있는 모습
버스형 토폴로지
버스: 가운데 공통으로 두고 다 같이 쓰는 선
- 제어기들을 확장하고 제거하는 데에 용이
브로드캐스트
브로드캐스트 방식: 연결되어 있는 모든 제어기의 같은 메시지 전체적으로 보내짐
- 필요한 메시지면 사용, 필요 없는 메시지면 버림
발생 가능한 문제
이상한 제어기가 이상한 신호를 지속적으로 보내게 되면 다른 외 제어기는 정상적으로 작동함에도 불구하고 정상적인 통신 불가
-> 스스로 고장을 감지하는 기능 추가하여 감지 시 Bus Off State로 들어가고 해당 상태가 되면 통신을 멈추게 됨
D-Sub 9pin Connecter

편리한 전선 연결을 위해 커넥터 종류 통합

CAN Bus는 두 종류(CAN High, CAN Low)의 wire을 사용함
120옴 저항
반사파에 의한 신호왜곡 방지를 위해 사용
새로 보내는 신호와 그 전에 보낸 신호의 반사된 신호가 만나 신호왜곡을 발생시킬 수 있음
따라서 버스 양 끝단에 저항을 달아 신호왜곡 방지
제어기 사용 시에도 120옴 저항 커넥터를 연결하여 사용해야 함


저항이 안 달린 커넥터도 있고 아닌 것이 있음
실제 사용할 때 쓰여진 글씨 스티커가 벗겨지는 경우가 다수이기 때문에 120옴 저항이 달려 있는 커넥터인지 아닌지 확인하는 것이 중요
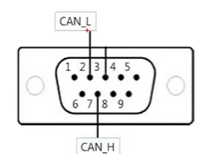
두 개의 전선중 CAN Low는 D-Sub 9pin Connecter의 2번 pin, CAN High는 D-Sub 9pin Connecter의 7번 pin으로 연결
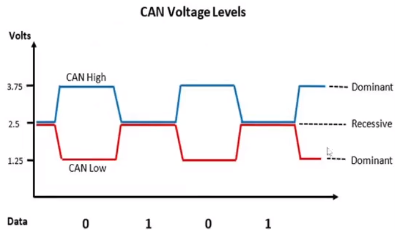
Data 0을 표현 = Dominant
Data 1을 표현 = Recessive
'INTERLUDE > Automotive' 카테고리의 다른 글
| CAN 통신 - 0 (0) | 2023.08.10 |
|---|---|
| Automotive Cybersecurity - 2 (0) | 2023.08.10 |
| Automotive Cybersecurity - 1 (0) | 2023.08.08 |
| CSMS(유럽 사이버 보안관리체계) (0) | 2023.08.04 |
| V2I 통신의 이해 (0) | 2023.05.09 |


